Беспроводной охранный датчик на ардуино. Бюджетная GSM сигнализация с мозгами из Arduino
Всем привет, сегодня мы рассмотрим устройство под названием датчик движения. Многие из нас слышали об этой штуке, кто то даже имел дело с этим устройством. Что же такое датчик движения? Попробуем разобраться, итак:
Датчик движения, или датчик перемещения - устройство (прибор) обнаруживающий перемещение каких либо объектов. Очень часто эти устройства, используются в системах охраны, сигнализации и мониторинга. Форм факторов этих датчиков существует великое множество, но мы рассмотрим именно модуль датчика движения для подключения к платам Arduino, и именно от фирмы RobotDyn. Почему именно этой фирмы? Я не хочу заниматься рекламой этого магазина и его продукции, но именно продукция данного магазина была выбрана в качестве лабораторных образцов благодаря качественной подаче своих изделий для конечного потребителя. Итак, встречаем - датчик движения (PIR Sensor) от фирмы RobotDyn:


Эти датчики малы по габаритам, потребляют мало энергии и просты в использовании. Кроме того - датчики движения фирмы RobotDyn имеют еще и маркированные шелкографией контакты, это конечно мелочь, но очень приятная. Ну а тем кто использует такие же датчики, но только других фирм, не стоит беспокоиться - все они имеют одинаковый функционал, и даже если не промаркированы контакты, то цоколёвку таких датчиков легко найти в интернете.
Основные технические характеристики датчика движения(PIR Sensor):
Зона работы датчика: от 3 до 7 метров
Угол слежения: до 110 о
Рабочее напряжение: 4,5...6 Вольт
Потребляемый ток: до 50мкА
Примечание: Стандартный функционал датчика можно расширить, подключив на пины IN и GND датчик освещенности, и тогда датчик движения будет срабатывать только в темноте.
Инициализация устройства.
При включении, датчику требуется почти минута для инициализации. В течение этого периода, датчик может давать ложные сигналы, это следует учесть при программировании микроконтроллера с подключенным к нему датчиком, или в цепях исполнительных устройств, если подключение производится без использования микроконтроллера.
Угол и область обнаружения.
Угол обнаружения(слежения) составляет 110 градусов, диапазон расстояния обнаружения от 3 до 7 метров, иллюстрация ниже показывает всё это:

Регулировка чувствительности(дистанции обнаружения) и временной задержки.
На приведённой ниже таблице показаны основные регулировки датчика движения, слева находится регулятор временной задержки соответственно в левом столбце приведено описание возможных настроек. В правом столбце описание регулировок расстояния обнаружения.

Подключение датчика:
- PIR Sensor - Arduino Nano
- PIR Sensor - Arduino Nano
- PIR Sensor - Arduino Nano
- PIR Sensor - для датчика освещенности
- PIR Sensor - для датчика освещенности
Типичная схема подключения дана на схеме ниже, в нашем случае датчик показан условно с тыльной стороны и подключен к плате Arduino Nano.

Скетч демонстрирующий работу датчика движения(используем программу ):
/* * PIR Sensor -> Arduino Nano * PIR Sensor -> Arduino Nano * PIR Sensor -> Arduino Nano */ void setup() { //Установить соединение с монитором порта Serial.begin(9600); } void loop() { //Считываем пороговое значение с порта А0 //обычно оно выше 500 если есть сигнал if(analogRead(A0) > 500) { //Сигнал с датчика движения Serial.println("Есть движение!!!"); } else { //Нет сигнала Serial.println("Всё тихо..."); } }
Скетч является обычной проверкой работы датчика движения, в нём есть много недостатков, таких как:
- Возможные ложные срабатывания, датчику необходима самоинициализация в течение одной минуты.
- Жесткая привязка к монитору порта, нет выходных исполнительных устройств(реле, сирена, светоиндикация)
- Слишком короткое время сигнала на выходе датчика, при обнаружении движения необходимо программно задержать сигнал на более долгий период времени.
Усложнив схему и расширив функционал датчика, можно избежать вышеописанных недостатков. Для этого потребуется дополнить схему модулем реле и подключить обычную лампу на 220 вольт через данный модуль. Сам же модуль реле будет подключен к пину 3 на плате Arduino Nano. Итак принципиальная схема:

Теперь пришло время немного усовершенствовать скетч, которым проверялся датчик движения. Именно в скетче, будет реализована задержка выключения реле, так как сам датчик движения имеет слишком короткое время сигнала на выходе при срабатывании. Программа реализует 10-ти секундную задержку при срабатывании датчика. При желании это время можно увеличить или уменьшить, изменив значение переменной DelayValue . Ниже представлен скетч и видео работы всей собранной схемы:
/* * PIR Sensor -> Arduino Nano * PIR Sensor -> Arduino Nano * PIR Sensor -> Arduino Nano * Relay Module -> Arduino Nano */ //relout - пин(выходной сигнал) для модуля реле const int relout = 3; //prevMillis - переменная для хранения времени предидущего цикла сканирования программы //interval - временной интервал для отсчета секунд до выключения реле unsigned long prevMillis = 0; int interval = 1000; //DelayValue - период в течение которого реле удерживается во включенном состоянии int DelayValue = 10; //initSecond - Переменная итерации цикла инициализации int initSecond = 60; //countDelayOff - счетчик временных интервалов static int countDelayOff = 0; //trigger - флаг срабатывания датчика движения static bool trigger = false; void setup() { //Стандартная процедура инициализации порта на который подключен модуль реле //ВАЖНО!!! - чтобы модуль реле оставался в первоначально выключенном состоянии //и не срабатывал при инициализации, нужно записать в порт входа/выхода //значение HIGH, это позволит избежать ложных "перещелкиваний", и сохранит //состояние реле таким, каким оно было до включения всей схемы в работу pinMode(relout, OUTPUT); digitalWrite(relout, HIGH); //Здесь всё просто - ждем когда закончатся 60 циклов(переменная initSecond) //продолжительностью в 1 секунду, за это время датчик "самоинициализируется" for(int i = 0; i < initSecond; i ++) { delay(1000); } } void loop() { //Считать значение с аналогового порта А0 //Если значение выше 500 if(analogRead(A0) > 500) { //Установить флаг срабатывания датчика движения if(!trigger) { trigger = true; } } //Пока флаг срабатывания датчика движения установлен while(trigger) { //Выполнять следующие инструкции //Сохранить в переменной currMillis //значение миллисекунд прошедших с момента начала //выполнения программы unsigned long currMillis = millis(); //Сравниваем с предидущим значением миллисекунд //если разница больше заданного интервала, то: if(currMillis - prevMillis > interval) { //Сохранить текущее значение миллисекунд в переменную prevMillis prevMillis = currMillis; //Проверяем счетчик задержки сравнивая его со значением периода //в течение которого реле должно удерживаться во включенном //состоянии if(countDelayOff >= DelayValue) { //Если значение сравнялось, то: //сбросить флаг срабатывания датчика движения trigger = false; //Обнулить счетчик задержки countDelayOff = 0; //Выключить реле digitalWrite(relout, HIGH); //Прервать цикл break; } else { //Если значение всё еще меньше, то //Инкрементировать счетчик задержки на единицу countDelayOff ++; //Удерживать реле во включенном состоянии digitalWrite(relout, LOW); } } } }
В программе присутствует конструкция:
unsigned long prevMillis = 0;
int interval = 1000;
...
unsigned long currMillis = millis();
if(currMillis - prevMillis > interval)
{
prevMillis = currMillis;
....
// Наши операции заключенные в тело конструкции
....
}
Чтобы внести ясность, было решено отдельно прокомментировать эту конструкцию. Итак, данная конструкция позволяет выполнить как бы параллельную задачу в программе. Тело конструкции срабатывает примерно раз в секунду, этому способствует переменная interval . Сначала, переменной currMillis присваивается значение возвращаемое при вызове функции millis() . Функция millis() возвращает количество миллисекунд прошедших с начала программы. Если разница currMillis - prevMillis больше чем значение переменной interval то это означает, что уже прошло более секунды с начала выполнения программы, и нужно сохранить значение переменной currMillis в переменную prevMillis затем выполнить операции заключенные в теле конструкции. Если же разница currMillis - prevMillis меньше чем значение переменной interval , то между циклами сканирования программы еще не прошло секунды, и операции заключенные в теле конструкции пропускаются.
Ну и в завершение статьи видео от автора:
Пожалуйста, включите javascript для работы комментариев.
Инфракрасные (ИК, IR) датчики обычно используются для измерения расстояний, но их также можно использовать и для обнаружения объектов. Подключив несколько ИК-датчиков к Arduino, мы можете создать охранную сигнализацию.
Обзор
Инфракрасные (ИК, IR) датчики обычно используются для измерения расстояний, но их также можно использовать и для обнаружения объектов. ИК-датчики состоят из инфракрасного передатчика и инфракрасного приемника. Передатчик выдает импульсы инфракрасного излучения в то время, как приемник детектирует любые отражения. Если приемник обнаруживает отражение, это означает, что перед датчиком на некотором расстоянии есть какой-то объект. Если отражения нет, нет и объекта.
IR-датчик, который мы будем использовать в данном проекте, обнаруживает отражение в определенном диапазоне. Эти датчики имеют небольшое линейное устройство с зарядовой связью (CCD), которое детектирует угол, с которым ИК-излучение возвращается к датчику. Как показано на рисунке ниже, датчик передает инфракрасный импульс в пространство, а когда перед датчиком появляется объект, импульс отражается обратно к датчику под углом, пропорциональным расстоянию между объектом и датчиком. Приемник датчика детектирует и выводит угол, и, используя это значение, вы можете рассчитать расстояние.
Подключив пару ИК-датчиков к Arduino, мы можем сделать простую охранную сигнализацию. Мы установим датчики на дверной косяк, и, правильно выровняв датчики, мы сможем обнаружить, когда кто-то проходит через дверь. Когда это произойдет, сигнал на выходе ИК-датчика изменится, а мы обнаружим это изменение, постоянно считывая выходной сигнал датчиков с помощью Arduino. В данном примере мы знаем, что объект проходит через дверь, когда показание на выходе ИК-датчика превышает 400. Когда это произойдет, Arduino включит сигнал тревоги. Чтобы сбросить срабатывание сигнализации, пользователь может нажать на кнопку.
Комплектующие
- 2 x ИК-датчик расстояния;
- 1 x Arduino Mega 2560;
- 1 x зуммер;
- 1 x кнопка;
- 1 x резистор 470 Ом;
- 1 x NPN транзистор;
- перемычки.
Схема соединений
Схема для данного проекта показана на рисунке ниже. Выходы двух ИК-датчиков подключены к выводам A0 и A1 . Два других вывода подключены к выводам 5V и GND. 12-вольтовый зуммер подключен к выводу 3 через транзистор, а кнопка, используемая для отключения сигнализации, подключена к выводу 4.

На приведенной ниже фотографии показано, как мы наклеили датчики на дверной косяк для этого эксперимента. Разумеется, в случае постоянного использования вы установили бы датчики по-другому.

Установка
- Подключите выводы 5V и GND платы Arduino к выводам питания и GND датчиков. Вы также можете подавать на них внешнее питание.
- Подключите выходные выводы датчиков к выводам A0 и A1 платы Arduino.
- Подключите вывод 3 Arduino к базе транзистора через резистор 1 кОм.
- Подайте напряжение 12 В на коллектор транзистора.
- Подключите положительный вывод 12-вольтового зуммера к эмиттеру, а отрицательный - к шине земли.
- Подключите вывод 4 к выводу 5V через кнопку. В целях безопасности, во избежание протекания большого тока это всегда лучше делать через дополнительный небольшой резистор.
- Подключите плату Arduino к компьютеру через USB кабель и загрузите программу в микроконтроллер, используя Arduino IDE.
- Подайте на плату Arduino питание, используя блок питания, аккумулятор или USB кабель/
Код
const int buzzer=3; // вывод 3 – это выход на зуммер const int pushbutton=4; // вывод 4 – это вход для кнопки void setup() { pinMode(buzzer,OUTPUT); // настроить вывод 3 на выход pinMode(pushbutton,INPUT); // настроить вывод 4 на вход } void loop() { // прочитать выходной сигнал обоих датчиков и сравнить результат с пороговым значением int sensor1_value = analogRead(A0); int sensor2_value = analogRead(A1); if (sensor1_value > 400 || sensor2_value > 400) { while(true) { digitalWrite(buzzer,HIGH); // включить сигнал тревоги if(digitalRead(pushbutton) == HIGH) break; } } else { digitalWrite(buzzer,LOW); // выключить сигнал тревоги } }Видео
Данный проект касается разработки и усовершенствования системы для предотвращения/контроля любых попыток проникновения воров. Разработанное охранное устройство использует встроенную систему (включает аппаратный микроконтроллер с использованием открытого программного кода и gsm модем) на базе технологии GSM (Глобальная система подвижной связи).
Охранное устройство может быть установлено в доме. Интерфейсный датчик охранной сигнализации также подсоединен к охранной системе на базе контроллера.
При попытке проникновения система передает предупреждающее сообщение (например, sms) владельцу на мобильный телефон или на любой заранее сконфигурированный мобильный телефон для дальнейшей обработки.

Охранная система состоит из микроконтроллера Arduino Uno и стандартного модема SIM900A на базе GSM/GPRS. Вся система может питаться от любого источника питания/батареи 12В 2A.
Ниже показана схема охранной системы на базе Arduino.
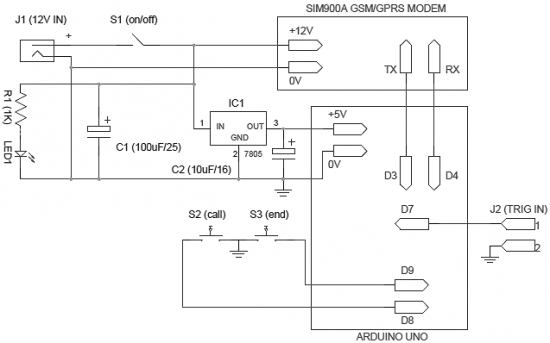
Работа системы очень проста и не требует разъяснений. Когда на систему подается питание, она переходит в дежурный режим. Когда выводы коннектора J2 закорочены, заранее запрограммированное предупреждающее сообщение передается на требуемый мобильный номер. Вы можете подсоединить любой детектор обнаружения проникновения (такой как световое защитное приспособление или датчик движения) к входному коннектору J2. Заметьте, что активный-низкий (L) сигнал на выводе 1 коннектора J2 активирует срабатывание охранной сигнализации.
Более того, в систему добавлено опциональное приспособление “вызов – тревога”. Оно активирует телефонный звонок, когда пользователь нажмет кнопку S2 (или когда другой электронный блок инициирует сигнализацию). После нажатия кнопки “call” (S2), вызов можно отменить, нажав другую кнопку S3 – кнопку “end”. Данная опция может использоваться для подачи сигнала тревоги в случае “пропущенного звонка” в случае проникновения.
Схема очень гибкая, поэтому может использовать любой SIM900A модем (и, конечно, плату Arduino Uno). Внимательно прочтите документацию на модем до начала сборки. Это позволит облегчить и сделать приятным процесс изготовления системы.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| Плата Arduino | Arduino Uno | 1 | В блокнот | |||
| GSM/GPRS-модем | SIM900A | 1 | В блокнот | |||
| IC1 | Линейный регулятор | LM7805 | 1 | В блокнот | ||
| C1 | 100мкФ 25В | 1 | В блокнот | |||
| C2 | Электролитический конденсатор | 10мкФ 16В | 1 | В блокнот | ||
| R1 | Резистор | 1 кОм | 1 | В блокнот | ||
| LED1 | Светодиод | 1 | В блокнот | |||
| S1 | Кнопка | С фиксацией | 1 |
Доброе время суток 🙂 Сегодня поговорим о сигнализации. На рынке услуг полно фирм, организацией, которые занимаются установкой и обслуживанием охранных систем. Эти фирмы предлагают покупателю широкий выбор сигнализацией. Однако их стоимость далеко не копеечная. Но что же делать человеку, у которого не так уж и много личных средств, что можно потратить на охранную сигнализацию? Думаю, вывод напрашивается сам собой – сделать сигнализацию своими руками . В этой статье приведён пример того, как можно сделать свою собственную кодовую охранную систему используя плату Arduino uno и несколько магнитных датчиков.
Систему можно дезактивировать вводом пароля с клавиатуры и нажатием кнопки ‘* ‘. Если хотите изменить текущий пароль, можете сделать это нажав на клавишу ‘B ‘, а если хотите пропустить или прервать операцию, можете сделать это нажав на клавишу ‘#’. В системе есть зуммер для воспроизведения различных звуков при выполнении той либо иной операции.
Активируется система нажатием кнопки ‘A’. Система даёт 10 секунд на то, чтобы покинуть помещение. После прошествии 10 секунд сигнализация будет активирована. Количество магнитных датчиков будет зависит от вашего собственного желания. В проекте задействованы 3 датчика (для двух окон и двери). Когда окно открывается система активируется, и включается сигнал тревоги идущий с зуммера. Систему можно дезактивировать путем набора пароля. Когда открывается дверь, сигнализация даёт вошедшему 20 секунд для ввода пароля. Система использует ультразвуковой датчик, что может обнаруживать движение.
Видео работы устройства
Поделка изготовлена в ознакомительных/обучающих целях. Если хотите использовать её у себя дома, будет необходимо её доработать. Заключить управляющий блок в металлический корпус и обезопасить линию питания от возможного повреждения.
Давайте начинать!
Шаг 1: Что нам будет нужно

- плата Arduino uno;
- высококонтрастный LCD дисплей 16×2;
- клавиатура 4×4;
- 10~20кОм потенциометр;
- 3 магнитных датчика (они же герконы);
- 3 2-х пиновых винтовых клеммы;
- HC-SR04 ультразвуковой датчик;
Если вы хотите собрать систему без использования Arduino, вам также потребуется следующее:
- DIP разъём для atmega328 + микроконтроллер atmega328;
- 16MГц кварцевый резонатор;
- 2 шт. 22pF керамических, 2 шт. 0.22uF электролитических конденсатора;
- 1 шт. 10кОм резистор;
- гнездо под питание (DC power jack);
- макетная плата;
- 5В блок питания;
И одна коробка, чтобы всё это упаковать!
Инструменты:
- Что-то, чем можно разрезать пластиковую коробку;
- Термоклеевой пистолет;
- Дрель/шуруповерт.
Шаг 2: Схема сигнализации

Схема соединения довольно простая.
Небольшое уточнение:
Высококонтрастный LCD:
- Pin1 — Vdd к GND;
- Pin2 — Vss к 5В;
- Pin3 — Vo (к центральному выводу потенциометра);
- Pin4 — RS к 8 выводу Arduino;
- Pin5 — RW к GND;
- Pin6 — EN к 7 выводу Arduino;
- Pin11 — D4 к 6 выводу Arduino;
- Pin12 — D5 к 5 выводу Arduino;
- Pin13 — D6 к 4 выводу Arduino;
- Pin14 — D7 к 3 выводу Arduino;
- Pin15 — Vee (к правому или левому выводу потенциометра) .
Клавиатура 4×4:
От левого к правому:
- Pin1 к A5 выводу Arduino;
- Pin2 к A4 выводу Arduino;
- Pin3 к A3 выводу Arduino;
- Pin4 к A2 выводу Arduino;
- Pin5 к 13 выводу Arduino;
- Pin6 к 12 выводу Arduino;
- Pin7 к 11 выводу Arduino;
- Pin8 к 10 выводу Arduino.
Шаг 3: Прошивка

В шаге представлен код, что используется встроенным !
Скачайте плагин codebender. Нажмите на кнопку «Run» в Arduino и прошейте свою плату этой программой. На этом всё. Вы только что запрограммировали Arduino! Если хотите внести изменения в код, нажмите кнопку»Edit».
Примечание: Если вы не будете использовать Codebender IDE для программирования платы Arduino, вам будет нужно установить дополнительные библиотеки в Arduino IDE.
Шаг 4: Изготавливаем собственную управляющую плату

После того, как удачно собрали и протестировали новый проект на базе Arduino uno, можете начать изготовление собственной платы.
Несколько советов, для более успешного завершения затеянного:

- 10кОм резистор должен монтироваться между 1 (reset) и 7 (Vcc) выводами микроконтроллера Atmega328.
- 16MГц кварцевый резонатор должен подсоединятся к выводам 9 и 10, отмеченными, как XTAL1 и XTAL2
- Соедините каждый вывод резонатора с 22pF конденсаторами. Свободные выводы конденсаторов заведите на 8 вывод (GND) микроконтроллера.
- Не забудьте соединить вторую линию питания ATmega328 с блоком питания, выводы 20-Vcc и 22-GND.
- Дополнительную информацию по выводам микроконтроллера можете найти на втором изображении.
- Если планируете использовать блок питания с напряжением выше 6В, необходимо воспользоваться линейный регулятором LM7805 и двумя 0.22uF электролитическими конденсаторами, которые следует смонтировать на входе и выходе регулятора. Это важно! Не подавайте больше, чем 6В на плату!!! В противном случае вы спалите свой микроконтроллер Atmega и LCD дисплей.
Шаг 5: Размещаем схему в корпусе






